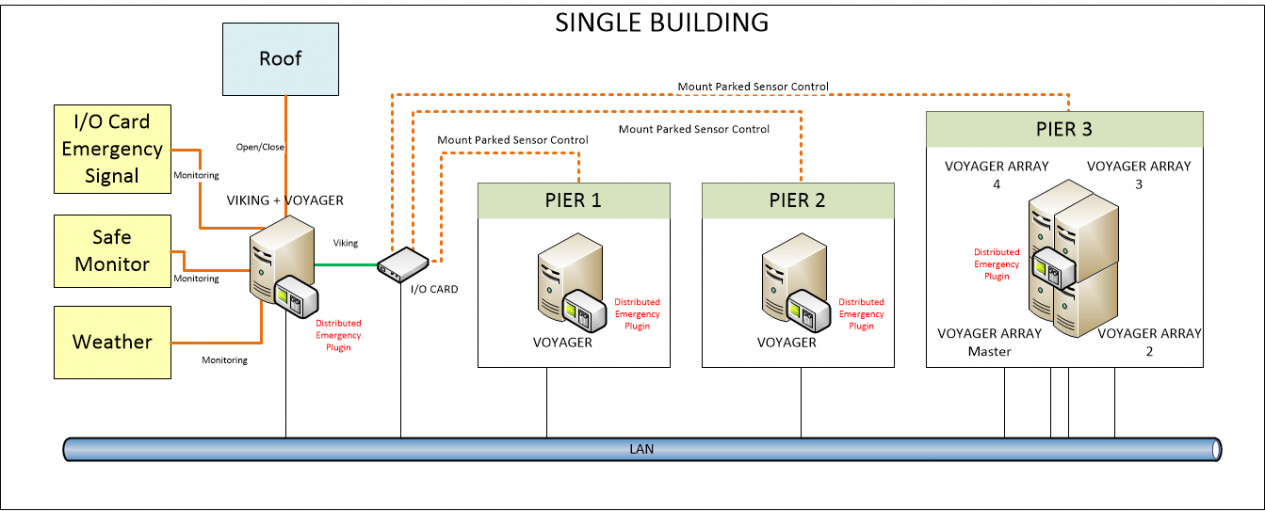
I have an observatory with 2 piers, each running Voyager. I have just purchased the Distributed Emergency plugin and will run a 3rd computer to control the observatory roof and cloud watcher.
Am I correct in assuming that the dragscripts on each of the piers can have their own start times and when they are ready to open the roof, then that command is sent to the 3rd computer to open the roof?
No, the master computer controls the roof on its own and just provides the distributed emergency status to the pier computers. So the drag script on the master waits for conditions to be right and then opens the roof. When conditions are right and the roof is open it then sets the distributed emergency status to safe and then the other voyagers will see it as safe. In the the drag scripts on the other voyagers instead of waiting for astronomical night or whatever you’d normally do you wait for distributed safe. If conditions become unsafe the pier voyagers will suspend or exit because the master will set emergency suspend or emergency exit and close the roof.
I have basically the same setup as @Wayne1 … 2 piers and a 3rd computer getting set up for Distributed Emergency right now … My primary concern is that I have an interference issue with my big refractor and the roll off roof. @KGoodwin … In your response, you say that the Master sets the status to safe once the roof is open. Is that for sure or do I need to script around that? The roof controller wont let the roof move unless the big refractor is parked (it has it’s own safety devices) but there is nothing within Voyager or the plugin documentation that doesn’t allow the mount to move if the roof is closed. Similarly, I need the big refractor to be parked before I even ask the roof to close but thats all scripted in right now as that instance of Voyager controls that mount and the roof. Probably worried about nothing and Leo has it all thought through but thats just my modus operandi. Thoughts?
Given that you should implement sensors to detect whether the roof is open, closed (and it’s not the dual of the previous one), and whether the mount is parked (all mounts), you can see the plugin diagram. However, if you want to disable the goto if the roof is closed, you’ll need to use Viking and a digital input: https://wiki.starkeeper.it/index.php/Viking_Setup#Viking_Setup_Workspace
This is because Voyager absolutely doesn’t rely on the driver status for these operations and relies solely on electronics and direct readings.
Thanks for the quick response … My roof controller (Dragonlair/ASCOM) does report the condition of the roof: Open/Closed/Moving to Voyager via it’s own physical limit switches. Is that sufficient or is that what you mean by “Driver Status”?
I already have a Denkovi relay with 6 more inputs available, so it’s not an issue to get some reed switches.