Is there a way to force a meridian Flip early? My scope is partially under the eaves of my house and start to get in the way about 1-2 hours ahead of the target reaching the meridian. If I Flip then, I can track a couple hours longer. I have an AP mount with APCC and can set the meridian early, if that makes a difference.
PS great program! I read the Wiki yesterday and am looking forward to using the scripting language.
Hello Wayne, I don’t want to manage meridian different than natural way for safety, bad experience. We can talk about when I have todo list more light
All the best
LO
Thanks Leo! I can certainly understand you don’t want to help me break my own equipment, I can do that all on my own! I now do this semi-manually and am pretty comfortable with it.
What I was thinking of is a script, not sure how since I’m just learning, to image until a certain time or the target reaches a certain altitude and pause, then resume when the target reaches the meridian which would trigger a pier flip, then resume imaging.
Or disable meridian flip control in Voyager, set the meridian an hour ahead of time in APCC, pause when the target reaches a certain altitude past that meridian limit, and do a precision goto, which would cause the scope to flip. Not asking you to spend any time, just comment on feasibility. Don’t want to disrupt other more important work.
Thanks again! I’m now working on creating profiles for all my camera, scope, reducer combinations. 3 cameras, 3 scopes/reducers, so 9 altogether. Need to set up in the Sky X and Voyager. Have plenty of time, cloudy forecast for the week
Wayne
Hi Wayne -
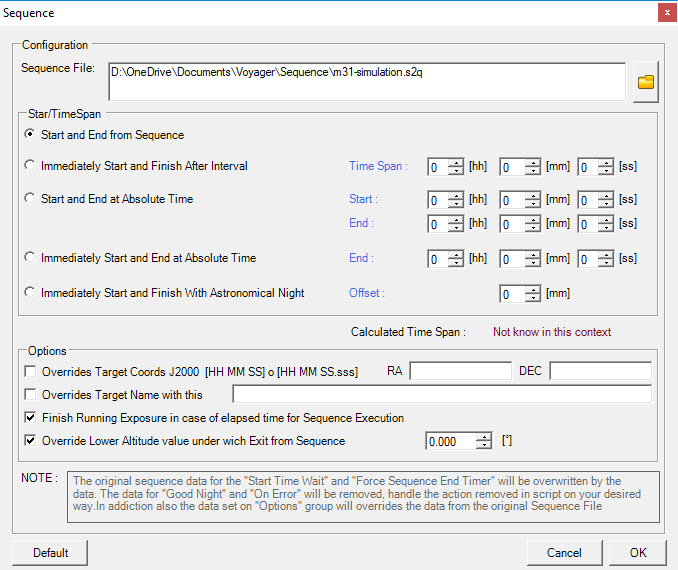
That’s a lot of profiles! You can easily do what you are asking about with a DragScript. One way is to set the start and end time in a Sequence block - this one is set to use the Start and End times specified in the Sequence definition itself, but you could also use Start and End at Absolute Times here and enter your desired times.
Another way is to use a Wait Altitude block in your DragScript:
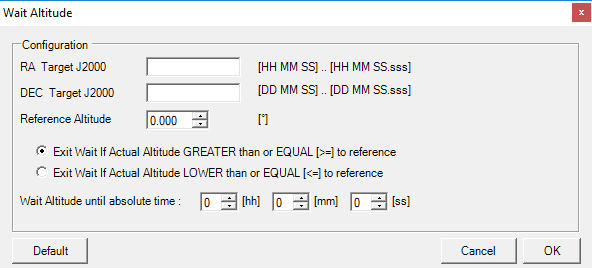
These are documented in the Wiki, but feel free to ask questions here.
Cheers,
Rowland
Wayne
You seem to be using an Astro-Physics Mount with APCC? I do have an 1100GTO and use APCC.
I disable meridian management with Voyager and let APCC handle these throughout. My mount flips to the East of my pier as early as possible (as set in APCC’s meridian limits) and sometimes image on a single side all night. No crashes.
Roberto
That’s right Roberto, thanks!
PS Roberto how do you manage the imaging when the pier flips? Somehow the Voyager sw would need to know to stop and do a precision go-to to recenter the target.
Wayne
Indeed. I have no specific setting in Voyager for this. If a pier flips occurs during a GoTo, Voyager detects it and re-centres automatically. If a pier flip occurs because of reaching a local meridian (as defined in APCC), which is rare, Voyager will detect an imaging error (guide star lost for example) and will go through its predetermined routine to recover from it.
Roberto
PS Previously I was using MaxPilote before Voyager for my automation. To my knowledge it is the only software out there that actively seeks out time to meridian information for AP mounts and determines whether to start an image or not. This was by design as I discussed this feature with MaxPilote’s developer some years ago. He noticed the information was available from the AP driver (through APCC dictating it) and just modified the programme to take this into account. Whilst using MaxPilote for some 4 years, I never had a pier crash. Only reason I switched to Voyager is because I don’t need two pieces of additional slave software for imaging (MaxIM and FocusMax) which were necessary for MaxPilote (as I didn’t have TheSky).
Sorry but i dont understand again what the mean to anticipate the meridian … altitude of object is the same if you start meridian 2 hour before, the object is always on the same place … if there’s some obstacle this doesn’t change the rule. What mean you have 2 more hour to track exactly ? Sorry but my poor english can get me wrong. Changing meridian is really fast …
Leo
We are talking about tracking with counterweights up. Early meridian flips are a standard feature of AP mounts (as you will know from your Mach1 mount) and make imaging without a meridian flip really convenient.
We could argue about whether they are necessary in a world of fast plate solving, etc but some of us have grown accustomed to using them whenever possible.
Roberto
I have a Mach and i used the meridian delay … bad things happen when i switch to new driver version some years ago. This is why i not feel good with this …
All the best
LO
Hi Rowland,
I have a similar challenge. I am using a tripod and my mount can’t track all the way to the zenith. I tried to use either way you describe above, but couldn’t figure it out.
Basically what I want is to image until the mount is n degrees before the zenith. Then wait m minutes and then do the meridian flip.
-
I could use the Start and End time in the Sequence Configuration. But that would be quite an effort as I would have to calculate each night when the object reaches my limit position and enter that.
-
I’m not sure the Wait Altitude block would work as I don’t want to wait for the object to reach a certain altitude but image until it reaches that.
… but I’m still a beginner. I might not understand correctly.
Thanks
Mark
Use Sequence constraints in Sequence Configuration, just put your altitude in above field constraint.
Sequence will be closed when object reach the asked altitude.
All the best
LO
Hi LO,
Thanks for the quick reply.
I guess that means that I will have to create three entries in my script:
- one sequence with the altitude limit
- one wait for altitude
- and another sequence entry (this time with our without altitude limit)
Is that correct?
Thanks
Mark
Yes Mark this should be work.
All the best
LO
Hi,
I just wanted to check if this is still valid? Or are there easier ways to do an early Meridian flip?
Thanks
Mark
Yoiu will not find an early meridian flip in Voyager.
If you want you can manage externally.
All the best
LO
I run into an issue with this the last nights (took me a while to figure out what was going on):
I set the altitude limit to 75 degrees (in the Sequence constraints and in the Wait process).
Voyager started to take an image when the object was just below 75 degrees. While it was taking the image, the scope moved up, hit the pier, PHD2 threw an error as it couldn’t guide anymore and the whole run stopped because of that error.
Last night, I tried to set the limit 65 just to see what happens. And the sequence stopped soon enough, but then it took so long for the object to cross the meridian and go below 65 that the wait process timed out (I didn’t even know that could happen). At that point, Voyager tried to execute the second sequence, the scope hit the pier and the run aborted again.
Is there some way to set the altitude limit not where the object is right now, but where it will be during the next exposure? That would be the preferred way.
Or is there a way to disable the wait timeout. This is slightly less preferred as I would need to set the altitude limit to a lower number and might loose some imaging time.
Thanks
Mark
Explore the HA blocks and constraints this can help you because are expressed in hours so you can calculate better … but in anycase :
-
if your telescope hit in anycase at meridian … there are no way to help you than calculate yourself altitude or HA with amount of time for the worst case … this kind of problem isn’t really common and I suggest you to find a mechanical solution.
-
if you can manage the meridian flip to avoid telescope hit the pier and doesn’t use delay or early meridian flip. Limits in altitude are already present in Voyager so use it, if an exposure start the exposure will be finished normally. If you set in sequence to force meridian flip after e defined time the exposure will be aborted and meridian flip done. If you manage a meridian flip with right timing nothing can hit anything.
-
Out of meridian cross zone there are not hit zone, just be sure to set the limit min altitude in voyager general setting on in your mount driver limits.
-
If you wait an altitude out of the sequence for a target just be sure in dragscript to put the mount in park or stop the tracking or put in a safe place.
All the best
Leonardo