This is an extraordinary work, Gabe. I won’t pretend I understood all of it, but I imagine this will be very useful to those who really need to dig into their data to assess its quality.Thanks for this contribution to the Voyager imaging community.
Hi Gabe
I’m stunted by the work you have done with this project. I tried to install it in december but had no success (lack of time I guess). I’ll try again because it could be very usefull. Thank you very much for your contribution !!.
Thanks all for the kind words. I’m going to focus in the next couple of days on documentation and reorg to help make it more clear how to get up and running. I think I’ll also create a few videos and post to youtube on the different apps and how to build/run them.
This planner looks fantastic and is a great tool to plan out imaging sessions.
My issue is I’m not familiar navigating in github and am not sure what to download, can you tell me what I need to do to make this work, I have windows 10 pro.
Edit the entries in conf/env.conf
a. Set DATA_PATH to the path where you store your data files. These files will be read only, and the app will not alter any data. This path should only include lights for now. I will work on a fix to allow darks/bias in this path, but currently the star extraction process fails for these files (since there are no stars).
b. Set TARGETS_PATH to the path where your roboclip file is. This path is usually C:\Users\{USERNAME}\Documents\Voyager\Data.
Run the bat script (if on Windows) run-docker.bat. If using on Mac/Linux, use ./run-docker.sh.
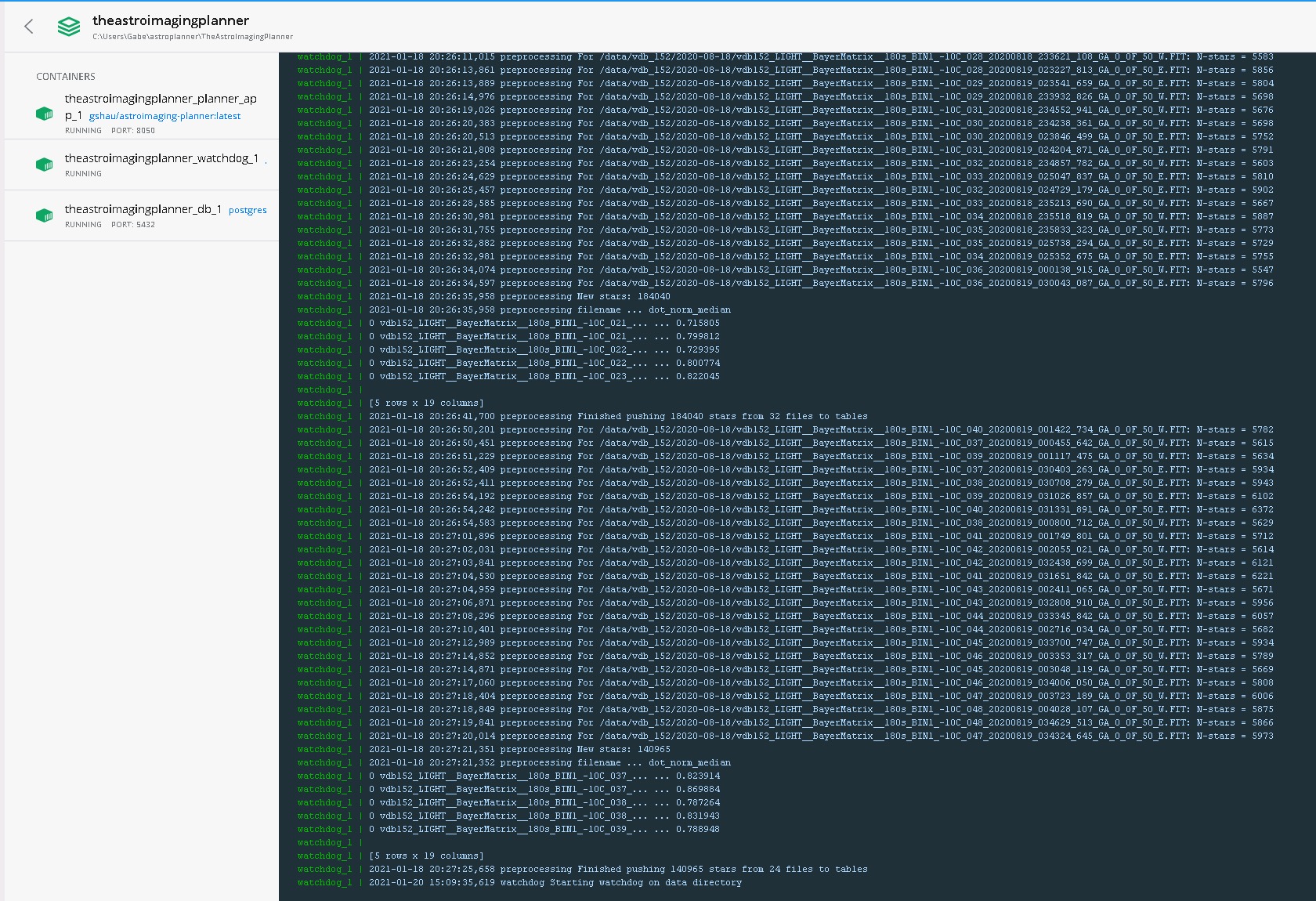
This will open a terminal window and start the app. There are three components to the app:
The main UI which shows the dashboard and renders figures, etc. In the logs, this is labeled planner_app_1
A watchdog to look for additional files, etc. For each FITs file, it extracts header, extracts the stars, measures it’s properties and aggregates them for storage in the db. In the logs, this is labeled watchdog_1
A postgresql database to store all the fits headers and star metrics. In the logs, this is labeled db_1
While the db is being built, there may be some errors thrown in the UI logs. This is normal and typically resolves after a few minutes.
You should be able to close the command window that comes up when you run the run-docker script. You can track the activity in the main docker GUI:
Wonderful app!
This will really make all of us more productive imagers.
Once you are able to remove bad images from the data base do think there will be a way to automatically update the remaining images on a target in Voyager ?
I have successfully installed your application. It is working as expected except that the target list does not update when a new target is added in the Roboclip Database. I did try the Drag n drop button and select the VoyRC.mdb file but the target list stays the same.
I’m I missing something ?
That’s a great suggestion, and one I’ve been thinking about adding for some time. It would take some work to get that implemented, so would be a long term goal.
Yes, I’ll have a new version out soon that will handle this. Currently, I have it read the roboclip db on container start, so it won’t update. I’ll post here when that’s live.
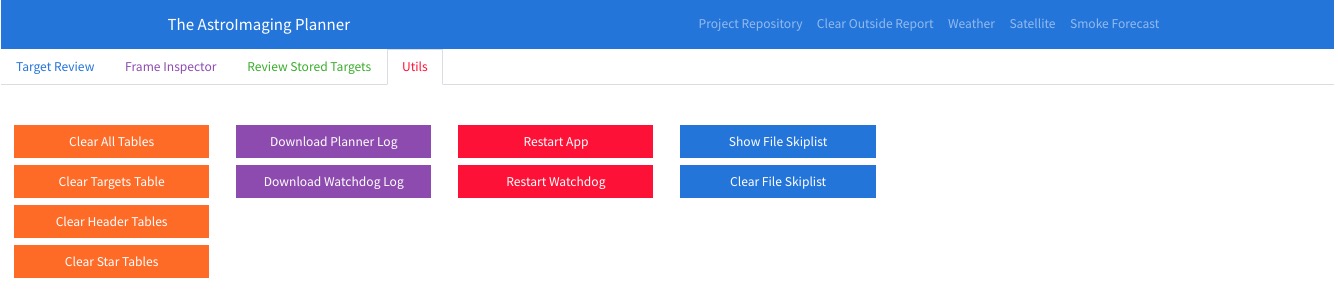
The latest version (v0.2.3) of TheAstroImagingPlanner is now available. This should fix the issues you’re having. I’ve also surfaced some actions in another tab to clear database tables, and to restart the app. Let me know if you encounter any more issues.
Hi
I have updated with the new version. I have a few errors. The one about the weather graph is not new but the other ones are. I have adapted the new conf files with my info
The “Change Target Status” menu is empty And I think the button for saving the target status has disapeared.
here are the traceback
Traceback (most recent call last):
File “/app/src/app.py”, line 913, in store_data
for profile in profile_list:
TypeError: ‘NoneType’ object is not iterable
Traceback (most recent call last):
File “/app/src/app.py”, line 752, in update_target_for_status_callback
df_combined_group = df_combined[df_combined[“GROUP”].isin(profile_list)]
File “/usr/local/lib/python3.8/site-packages/pandas/core/series.py”, line 4685, in isin
result = algorithms.isin(self, values)
File “/usr/local/lib/python3.8/site-packages/pandas/core/algorithms.py”, line 417, in isin
raise TypeError(
TypeError: only list-like objects are allowed to be passed to isin(), you passed a [NoneType]
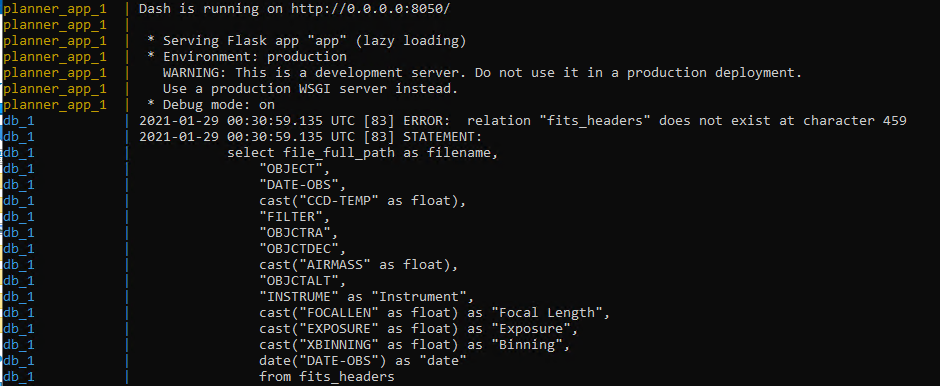
I probably have no clue what I am doing. I just installed Dock, set the path in env and fire up run-docker, and it gives me this error message, and seems stuck here:
It does seem like it’s progressing to the “watchdog” where it grabs images in the data folder (and subfolder) and seems analyzing the stars? I guess it would take a long time for a lot of data… also do I need to keep the planner open in the background all the time, or it does save the analyzed results and would only grab new images as they come in?
Thanks for the report. When profile_list is None, that indicates the Roboclip groups are not being processed correctly. What are your group names called? If you need more assistance, let me know via PM, and we can get more into details
Hi Yizhou!
Thanks for trying it out. It looks like the dash app is activated. Did you navigate to http://localhost:8050? If the fits_headers table isn’t being created, it’s likely because there are no suitable FITs files available in the path you provided. The watchdog goes through several steps, the first being a process of all the fits headers before going on to star metadata analysis. That fits header process should be relatively quick to start and you’ll see a bunch of files listed as they’re processed. The star analysis takes longer, and there’s extra verbosity there too on what it’s doing. If you see none of that, then I don’t think the watchdog has identified any files available for processing.
I have just released a new version with lots of new things:
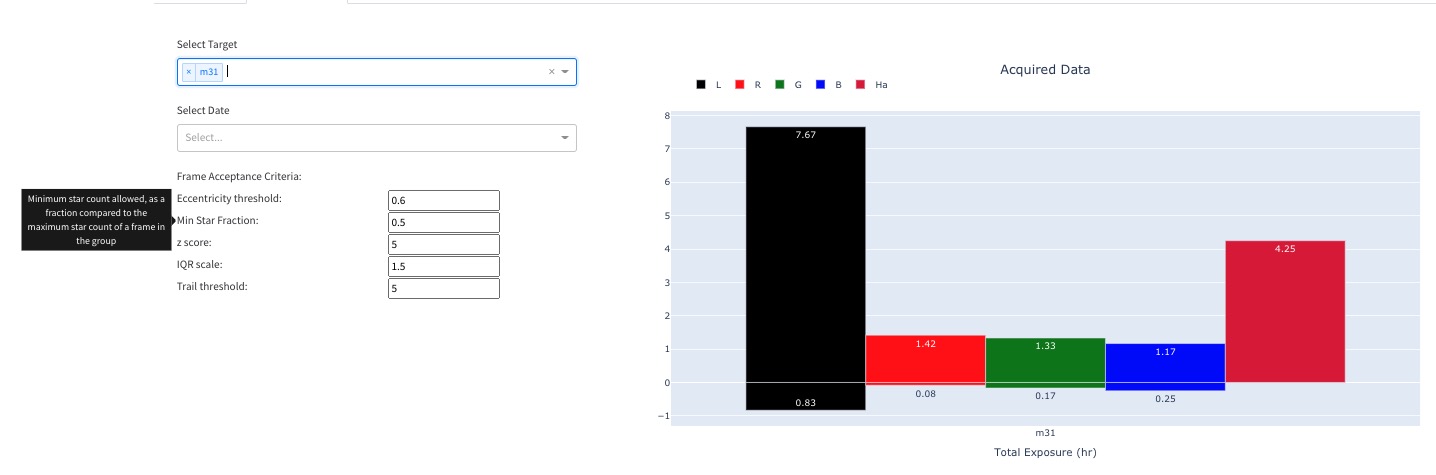
Automatic image grading! You can set the criteria thresholds you’d like to use, including star counts, eccentricity, etc., and the progress graphs will update accordingly. You always will have the all the data represented in the graph, but it’ll slide down with the negative portion of the graph indicating the subs that don’t pass the threshold.
Tooltips to help explain the image grading settings.
Additional progress graphs in the inspector view.
Date selection for inspector views.
Local database persistence. From this version on, you can upgrade the planner and not need to regenerate the database tables.
Improved status handling.
File skiplist buttons to clear/view the files that the watchdog has skipped due to an error.
General performance/stability improvements.
Also, new in this release is automatic image grading. You can specify the threshold values for some parameters like eccentricity, etc., and the progress graphs will update accordingly.
@Paul_Muller@martin This release should solve the issues you’ve been having. Please let me know via PM is you’re still having issues.
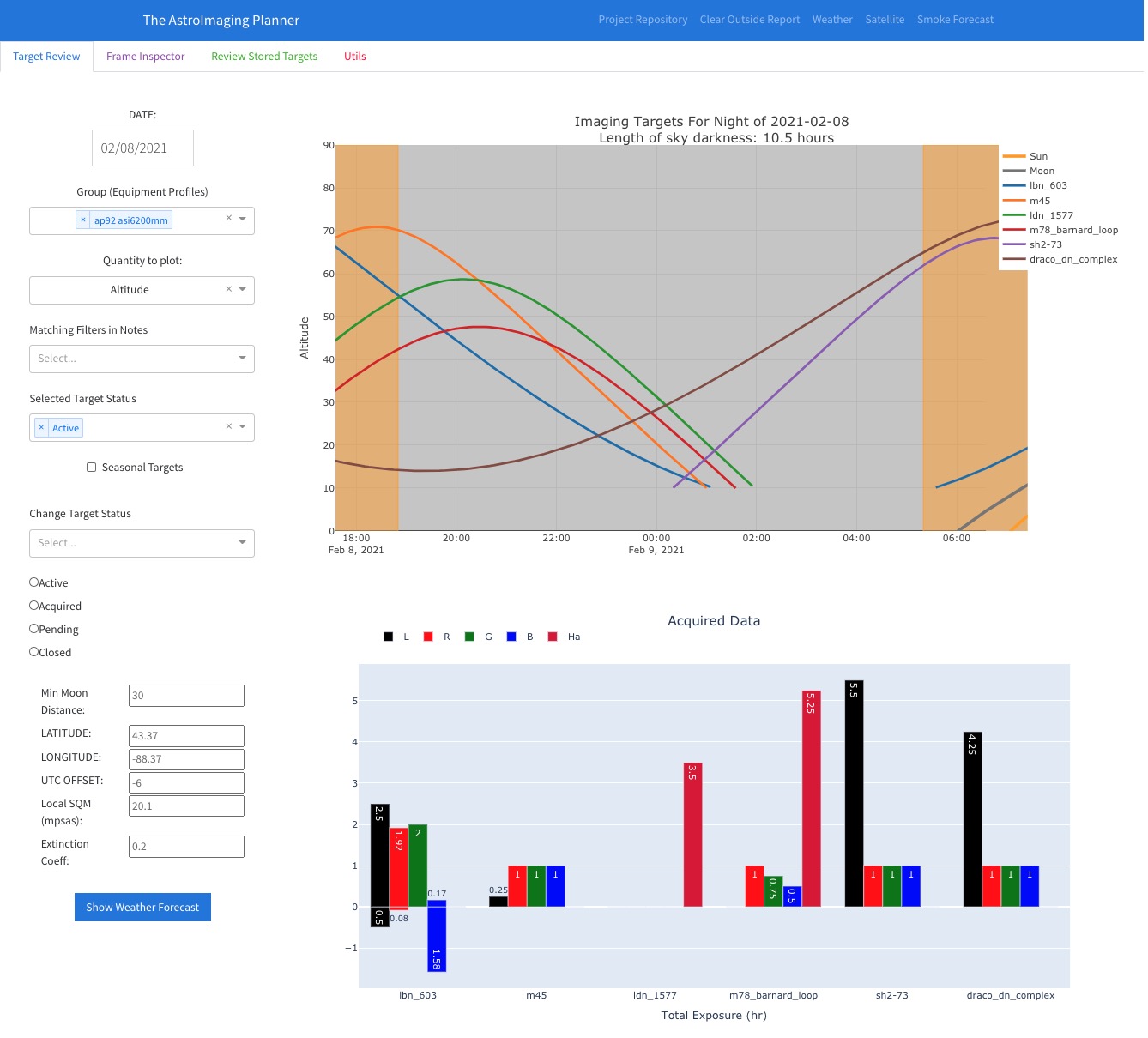
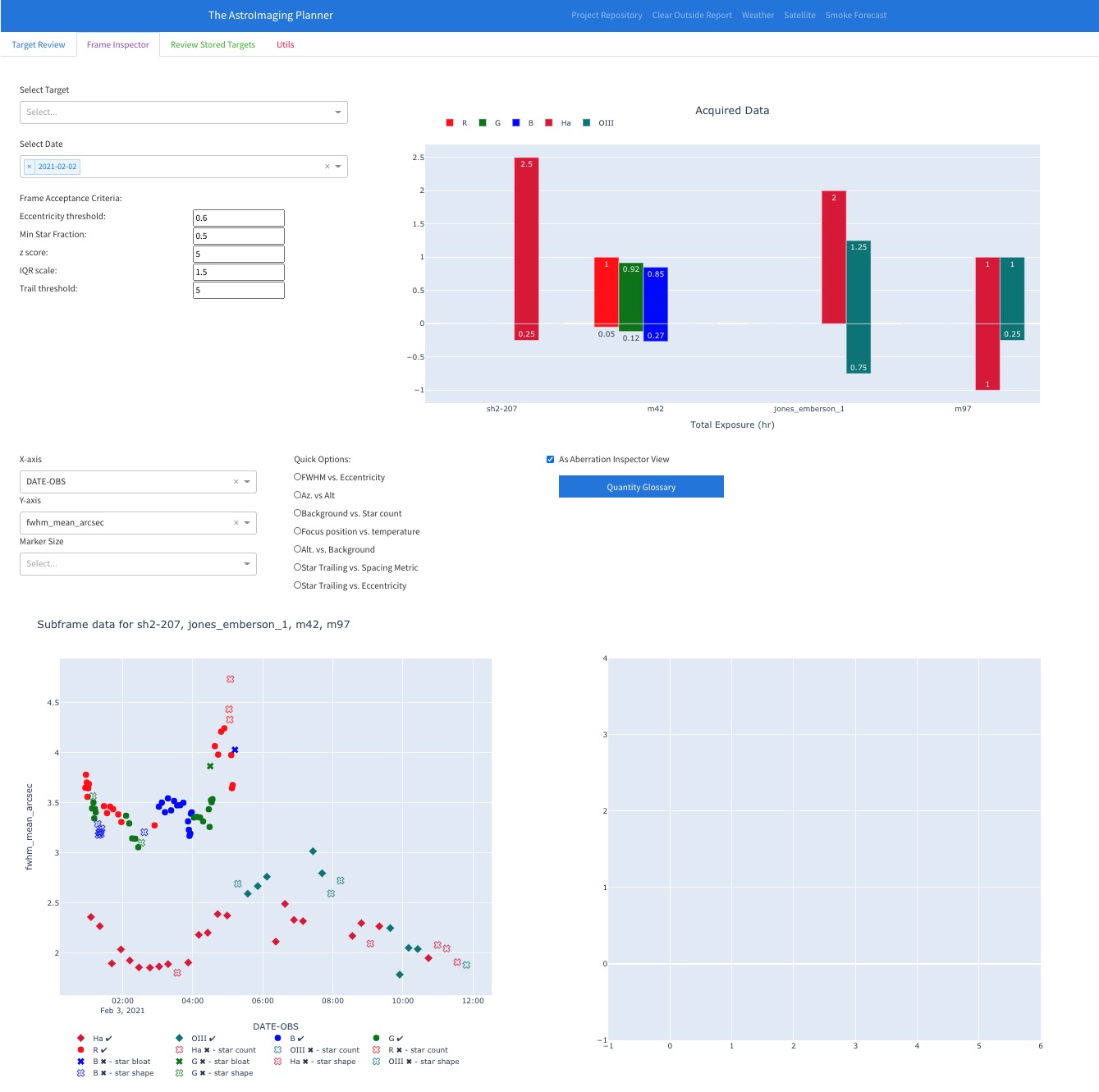
Here are some screenshots of the new version:
Main planner tab showing the updated acquired data graph.
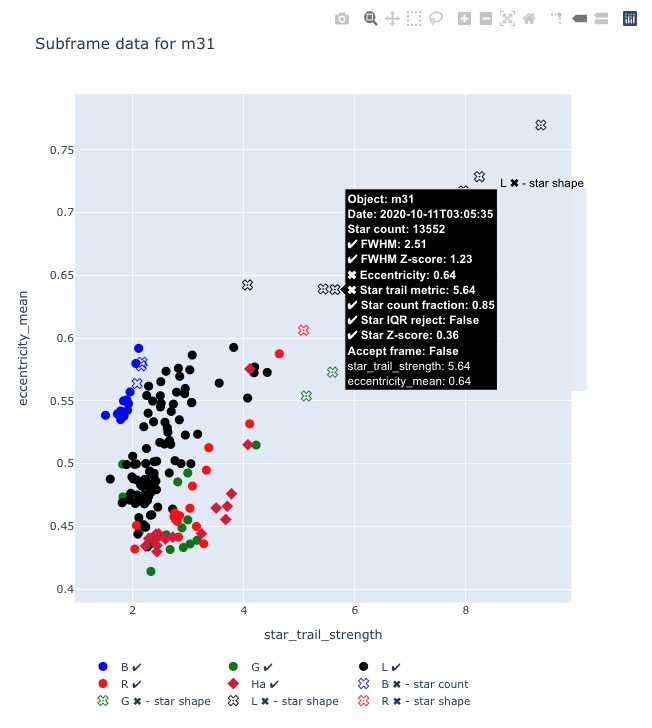
Previous night view where only the date is selected.
Only frames from that date are shown in the bar chart and scatter plot. I like this view since you can monitor the seeing across the night. I had two systems out for this night, and you can see the correlation of the FWHM is fairly high between the two sets of measurements.